找商网手机端:m.zhaosw.com

手机扫码查看 移动端的落地页
 店龄5年 ·
店龄5年 · 
苏州威密科自动化设备有限公司
主营产品: 日本DENSO电装, TOSHIBA东芝, 电装机器人, 东芝机器人, 众为兴机器人, 川崎机器人








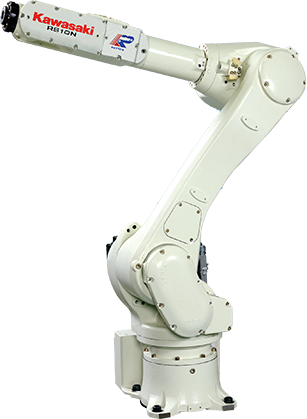
日本川崎Kawasaki大型搬运机器人RS010N
价格
订货量(台)
¥110000.00
≥1
店铺主推品 热销潜力款
쑥쑝쑣쑣쑥쑢쑞쑦쑡쑟쑟
在线客服
R系列机器人(3-80 kg)
点击下面的一个机器人来了解更多信息。注:图像未按比例示出。

点击下面的图片来查看。图中所示尺寸单位为毫米(mm)。
| RS010N的规格 | |||
| 手臂类型 | 多关节型机器人 | ||
|---|---|---|---|
| 自由度 (轴) | 6 | ||
| 最大负载能力 (kg) | 10 | ||
| 最大臂展 (mm) | 1,450 | ||
| 重复定位精度 (mm)✽1 | ±0.03 | ||
| 动作范围 (°) | 手臂旋转 (JT1) | ±180 | |
| 手臂前后 (JT2) | +145 - -105 | ||
| 手臂上下 (JT3) | +150 - -163 | ||
| 手腕旋转 (JT4) | ±270 | ||
| 手腕弯曲 (JT5) | ±145 | ||
| 手腕扭转 (JT6) | ±360 | ||
| 最大速度 (°/s) | 手臂旋转 (JT1) | 250 | |
| 手臂前后 (JT2) | 250 | ||
| 手臂上下 (JT3) | 215 | ||
| 手腕旋转 (JT4) | 365 | ||
| 手腕弯曲 (JT5) | 380 | ||
| 手腕扭转 (JT6) | 700 | ||
| 允许负载扭矩 (N•m) | 手腕旋转 (JT4) | 22 | |
| 手腕弯曲 (JT5) | 22 | ||
| 手腕扭转 (JT6) | 10 | ||
| 允许负载惯量 (kg•m2) | 手腕旋转 (JT4) | 0.7 | |
| 手腕弯曲 (JT5) | 0.7 | ||
| 手腕扭转 (JT6) | 0.2 | ||
| 重量 (kg) | 150 | ||
| 安装方式 | 地面, 悬挂 | ||
| 安装条件 | 环境温度 (°C) | 0 - 45 | |
| 相对湿度 (%) | 35 - 85 (无结露) | ||
| 控制柜 / 所需电源 (kVA) | F60 / 2.0 | ||
| 保护等级 | 手腕: IP67同等 基座: IP65同等 | ||
✽1: 以ISO9283为基准。

夏春冬
![]() 쑥쑝쑣쑣쑥쑢쑞쑦쑡쑟쑟
쑥쑝쑣쑣쑥쑢쑞쑦쑡쑟쑟
 立即询价
立即询价 扫码查看
手机扫码 快速查看
采购数量不能为空
联系信息不能为空
验证码不正确